The Team
The UNSW Competitive Robotics Group (UCRG) is a cross-disciplinary student team at the University of New South Wales, Sydney, Australia that develops autonomous ground and aerial vehicles for research and competition purposes. It is currently one of the best performing competitive student groups in Australia and holds performance records internationally.
Current Events - MBZIRC
Previous Events - IGVC AGVC NIARC FRC DRC
2018 - 2020
MBZIRC
The team is focusing on developing smaller and more versatile ground and aerial platforms for Mohamed Bin Zayed International Robotics Competition (Abu Dhabi, UAE) in 2020. This event requires cooperation between multiple vehicles to successfully complete challenge objectives, as well as seamlessly navigating both indoor and outdoor environments.
The focus for this year is simultaneous localization and mapping in GPS-denied environments, state-of-the-art aerial and ground vehicle control, and cooperative multi-agent planning.


2016 - 2017
MBZIRC
The team competed in all challenges of the Mohamed Bin Zayed International Robotics Competition (Abu Dhabi, UAE) in March 2017 as the Australian representatives. New aerial platforms, "Flappy" and "Fally", were developed using the DJI S900 and DJI F550 hexacopter frames. "Flappy" is shown in-flight carrying a mock payload.
This challenge involves autonomous operation of four competition vehicles. Three UAVs (unmanned aerial vehicles also known as drones) have been developed to autonomously locate, track, pickup and dropoff objects in a 100m x 100m field. At the end of the mission, the drones autonomously identify and land on a moving landing target. One UGV (unmanned group vehicle) was developed to autonomously locate and operate a valve using a set of spanners. Of out of 143 applicants, the team consistent ranked in the top ten for all events including the grand challenge.
Support from our partners and sponsors shown below has made this possible.
DRC
Later in the year, members of the team designed and built a new vehicle, and took first prize at the 2017 Droid Racing Challenge in Brisbane, Australia.
2015
IGVC
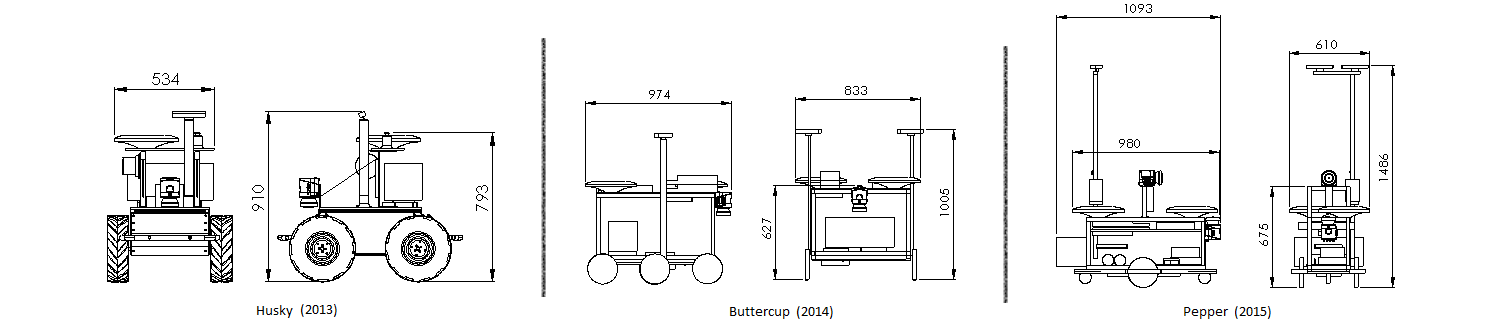
The team became the first Australian team to compete in the Intelligent Ground Vehicles Competition (Michigan, USA). With a new vehicle platform, Pepper, and a range of vehicle improvements and additional software and hardware innovations, the team "Saving Allen" won 5 awards and placing second overall. Among the awards were two first places in the autonomous navigation challenges, which were earned by flawlessly setting course records in the international advanced autonomous navigation course and the basic autonomous navigation course by a wide margin.
IGVC 2015 Autononomous Navigation Advanced Course
Ranking: #1
Distance: 1032 ft
Time: 3 minutes 52 seconds
Contributions to the path tracking software made by A/Prof Jay Katupitiya and Javad Taghia helped the team's autonomous vehicle achieve a high level of performance at the competition. Additional thanks to the UNSW Faculty of Engineering, NSW Trade & Investment, Advanced Navigation, Marathon Targets and SICK for helping make success possible.


2014
NIARC
The team split to compete as two separate entities, "UNSW Mechatronics" and "Lab202", in the National Instruments Autonomous Robotics Competition (Sydney, NSW, Australia). As there was virtually no collaboration between the two, the teams brought autonomous vehicles of vastly differing hardware and software designs. On the competition day, the teams demonstrated excellence and consistency by qualifying as first and second ranked seeds, and ultimately winning the tournament's first and second places. See NIARC 2014 coverage on ABC.
AGVC
A few months later at the second Autonomous Ground Vehicle Competition (Geelong, VIC, Australia), the team competed with a new vehicle, Buttercup, powered by the team's second-generation software as "UNSW Mechatronics". A number of modules relating to sensing, localisation, navigation and mapping were rewritten to work with new features such as instant-start, audible self-diagnostics, machine learning, and mobile platform control. With Buttercup, the team took the grand prize in the first heat.
2013
NIARC
Members of the team competed in the National Instruments Autonomous Robotics Competition (Melbourne, VIC, Australia) and returned with a second place trophy.
AGVC
A few months later at the first Autonomous Ground Vehicles Competition (Geelong, VIC, Australia), the team competed as "UNSW Mechatronics," assembling a vehicle and software using the Clearpath Robotics Husky A200 platform to achieve the best autonomous navigation performance with a second-place overall rank.